
Что вы узнаете
- Техника безопасности.
- Технические характеристики.
- Как светодиоды сигнализируют о состоянии квадрокоптера?
- Подключение к RobboScratch.
- Взлет в RobboScratch
Техника безопасности
1. Летайте только под присмотром
учителя или с его разрешения.
2. Не начинайте полет при подключенном проводе USB.
3. Перед каждым полетом проверяйте целостность пропеллеров. Полет с гнутым или разрушенным пропеллером может привести к повреждению квадрокоптера.
4. Квадрокоптер можно запускать только в помещении.
5. Перед полетом убедитесь, что над квадрокоптером нет препятствий: ламп, проводов, тросов.
6. Завершайте программу, как только поняли, что квадрокоптер потерял управление.
7. Все присутствующие в помещении люди должны находиться на расстоянии не менее 2 метров от квадрокоптера. Учитывайте возникновение нештатных ситуаций и отклонение квадрокоптера от намеченного курса.
8. Между вами и квадрокоптером не должно находиться ни одного человека.
9. Если квадрокоптер упал на бок, но еще работает - выключите его и только потом поднимите.
10. Рекомендуем запускать квадрокоптер в очках.
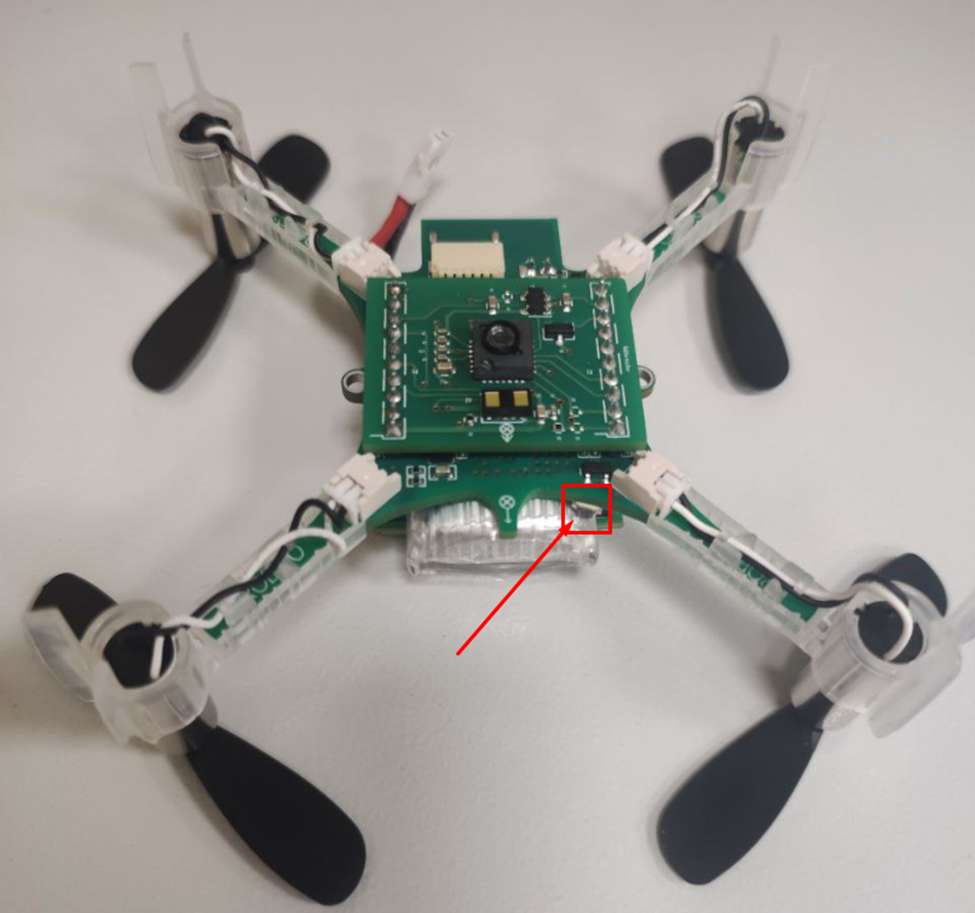
11. Переподключайте питание квадрокоптера перед каждым полетом. Для этого нужно нажать кнопку, расположенную возле аккумулятора. Аккумулятор при этом должен быть подключен к плате квадрокоптера.

2. Не начинайте полет при подключенном проводе USB.
3. Перед каждым полетом проверяйте целостность пропеллеров. Полет с гнутым или разрушенным пропеллером может привести к повреждению квадрокоптера.
4. Квадрокоптер можно запускать только в помещении.
5. Перед полетом убедитесь, что над квадрокоптером нет препятствий: ламп, проводов, тросов.
6. Завершайте программу, как только поняли, что квадрокоптер потерял управление.
7. Все присутствующие в помещении люди должны находиться на расстоянии не менее 2 метров от квадрокоптера. Учитывайте возникновение нештатных ситуаций и отклонение квадрокоптера от намеченного курса.
8. Между вами и квадрокоптером не должно находиться ни одного человека.
9. Если квадрокоптер упал на бок, но еще работает - выключите его и только потом поднимите.
10. Рекомендуем запускать квадрокоптер в очках.
11. Переподключайте питание квадрокоптера перед каждым полетом. Для этого нужно нажать кнопку, расположенную возле аккумулятора. Аккумулятор при этом должен быть подключен к плате квадрокоптера.
12. При написании программы, обязательно составьте блок аварийной посадки, где будет блок СТОП!
Например:
13. На стабильность полета влияет наличие воздушных потоков: окна, вентиляторы, кондиционеры.
Технические характеристики
- Время полета с аккумуляторной батареей: 7 минут.
- Время зарядки аккумуляторной батареи: 40 минут.
- Максимальный рекомендуемый вес полезной нагрузки: 15 г.
- Масса: 27 г.
- Размер: 92x92x29 мм.
- Радиочастотный усилитель 20 дБм, испытанный в диапазоне > 1 км.
- Поддержка Bluetooth Low Energy с доступными iOS и Android-клиентами (протестирована на iOS 7.1+ и Android 4.4+).
- Датчики: 3-осевой гироскоп, 3-осевой акселерометр, 3-осевой магнитометр, высокоточный датчик давления.
Более подробные характеристики описаны в этом документе.
Как светодиоды сигнализируют о состоянии квадрокоптера?
1. Квадрокоптер подключен к RobboScratch, можно начинать полет:
- синие светодиоды 2 и 3 непрерывно горят;
- передний правый светодиод 1 мигает зеленым дважды в секунду;
- 4 светодиод очень часто мигает красно-зеленым.
- синие светодиоды 2 и 3 непрерывно горят,
- передний правый светодиод 1 мигает зеленым дважды в секунду;
3. Bluetooth адаптер не подключен к компьютеру: передний левый светодиод (4) мигает красным и зеленым.
4. Батарея разряжена: передний правый светодиод (1) непрерывно горит зеленым.
5. Датчики нужно откалибровать:
- синие светодиоды (2 и 3) непрерывно горят;
- передний правый светодиод (1) несколько раз быстро промигает красным, потом раз в секунду будет мигать зеленым раз в 2 секунды.
В этом случае: положите квадрокоптер на ровную поверхность - произойдет самокалибровка.
6. Ошибка теста самодиагностики (self test): правый
передний светодиод (1) постоянно мигает пятью короткими зелеными импульсами раз в 3-4 секунды.
В этом случае: перезагрузите квадракоптер.
Установка драйверов
Без драйверов вы не сможете летать, у вас будет только возможность писать программы в RobboScratch, Python.
Чтобы установить драйвера, перейдите в инструкцию для вашей ОС:
- Если у вас Linux - инструкцию для этой операционной системы.
- Если у вас Windows - инструкцию для этой операционной системы.
Подключение к RobboScratch
Шаг 1. Скачайте RobboScratch. Подходит версия 3.58.0 и более поздние.
Шаг 2. Вставьте bluetooth адаптер в USB порт компьютера.
Шаг 3. Положите квадрокоптер на пол.
Можно положить квадрокоптер на любую ровную поверхность, но нужно учитывать, что при включении квадрокоптер определяет начальную координату. Это значит, что при взлете и маневрах, квадрокоптер будет изменять свои координаты относительно начальной точки.
Шаг 4. Подключите аккумулятор к плате квадрокоптера или нажмите кнопку включения питания.
Подключение аккумулятора:
Кнопка отключения/включения питания:
Квадрокоптер начнёт процедуру
калибровки: прозвучит звуковой сигнал и прокрутятся все пропеллеры.
|
Подождите завершения калибровки до перехода к следующему шагу! |
В результате: 2 и 3 синий светодиод непрерывно горит, 1 светодиод мигает зеленым.
Шаг 5. Запустите RobboScratch.
Шаг 6. Нажмите Поиск устройств.
Когда кнопка Q станет зеленой, квадрокоптер готов к взлету. При этом синие светодиоды 2 и 3 непрерывно горят; передний правый светодиод 1 мигает зеленым дважды в секунду; 4 светодиод очень часто мигает красно-зеленым.
Шаг 7. Для вызова меню квадрокоптера нажмите кнопку Q:
Квадрокоптер готов к полету.
Если светодиод 4 прекратил мигать, значит квадрокоптер отключился от RobboScratch. Чтобы это исправить, нужно перезагрузить питание квадрокоптера и заново подключиться к RobboScratch (шаги 3-5). Кнопка отключения/включения питания:
Взлет в RobboScratch
Чтобы взлететь, подключите квадрокоптер к RobboScratch и проверьте уровень заряда, нажав кнопку Q.
Рекомендуем повторно ознакомиться с техникой безопасности.
Шаг 1. Составьте программу аварийной посадки:
Теперь для мгновенной посадки нужно будет нажать пробел.
Шаг 2. Составьте программу тестового взлета:
Квадрокоптер взлетит на высоту 30-35 см, продержится на этой высоте 3 секунды и совершит посадку в точку взлета.
Шаг 3. Составьте свою программу полета.
|
! Любая программа должна включать в себя блоки Взлет и Посадка. |
С командой Лететь -  и
и  - квадрокоптер летит вперед:
- квадрокоптер летит вперед:
С командой  квадрокоптер перемещается на 100 см.
квадрокоптер перемещается на 100 см.
Команды перемещения квадрокоптера в относительных координатах:
Команды перемещения квадрокоптера в метрах относительно точки взлета:
Для
поворота квадрокоптера используется команда:.
В разделе Переменные или Операторы можно использовать блоки, которые передают программе информацию о текущем положении квадрокоптера:
Например, программа автоматической посадки квадрокоптера при его снижении до определенной высоты.