
Эта инструкция рассказывает о том, как собрать танцующего робота из набора материалов. Подключение к RobboScratch и тестирование робота описано в "Быстром старте с танцующим роботом". Если вы докупили для робота bluetooth модуль, воспользуйтесь инструкцией "Как настроить Bluetooth-модуль для танцующего робота".
Корпус танцующего робота
Скачайте STL файлы корпусных деталей танцующего робота и напечатайте их на 3D принтере.
Если вы используете принтеры Роббо, вы можете воспользоваться инструкцией для РОББО 3D-принтер Мини.
Готовый комплект выглядит, как на картинке ниже (цвет может быть любой).
Подготовьте инструмент и компоненты для сборки по перечню ниже
1. Отвертка с крестовым шлицем.
2. Аккумулятор “Крона” и адаптер для подключения Кроны к Arduino.
Рекомендуем использовать литиевую АКБ Крона на 9В.
3. Плата NANO и mini USB.
4. Arduino Shield.
5. Дальномер.
6. RGB - светодиод.
7. Четыре сервопривода MG90S.
8. Два сервопривода SG90.
9. Светодиодная матрица с платой-контроллером.
10. Комплект кабелей мама-мама.
11. Буззер.
Перепрошивка Arduino Nano и настройка моторов
Шаги 1-7 описывают прошивку Arduino Nano в Arduino IDE, шаги 7-9 - настройку моторов.
1. Скачайте и установите RobboScratch и Arduino IDE. Скачайте и разархивируйте программы прошивки EEprom_setter.zip и PROSH_OTTO (firmware_v00002).
2. Подключите плату к компьютеру через mini usb.
3. Запустите Arduino IDE.
4. В меню Инструменты > Плата нужно выбрать корректное название платы.
В наборе материалов может быть или плата Arduino Nano, или плата Nullab Nano. На возможности Танцующего робота модель платы никак не влияет, но инструкция по сборке немного отличается в зависимости от модели.
Для того чтобы определить модель платы, посмотрите, есть ли маркировка на чипе платы.
- Для платы с маркировкой в меню Инструменты > Плата > выберите Arduino NANO.
- Для платы без маркировки сначала добавьте название платы в Arduino IDE по инструкции; после этого в меню Инструменты > Плата > выберите Nullab Nano / Marker-Nano.
5. Выберите Инструменты > Порт > выберите порт подключенного устройства.
Посмотреть назначенный порт устройства можно в Диспетчере устройств. Если у вас подключено только одно устройство к компьютеру, то в Arduino IDE будет отображен только один порт.
6. Выберите Файл > Открыть > EEPROM_SETTER.ino > нажмите  и дождитесь сообщения: "Загрузка завершена".
и дождитесь сообщения: "Загрузка завершена".
Таким образом вы загрузите код EEPROM_SETTER.ino на плату.
7. Откройте файл PROSH_OTTO.ino.
Инструкция данного шага отличается в зависимости от модели платы:
- Для платы Arduino Nano изменения не требуются.
- Для платы Nullab Nano в коде PROSH_OTTO.ino нужно раскомментировать седьмую строчку (удалить // в начале строки) и закомментировать восьмую (добавить // в начале строки).
После этого нажмите  и дождитесь сообщения об успешной загрузке PROSH_OTTO.ino.
и дождитесь сообщения об успешной загрузке PROSH_OTTO.ino.
8. Отключите плату NANO от компьютера и подключите её в Arduino Shield.
9. Соблюдая полярность, подключите один из сервоприводов в разъем A0 на плате:
- коричневый провод сервопривода - подключите в пин “G” на плате;
- красный провод сервопривода - “V”;
- желтый провод сервопривода - “S”.
10. Подключите к плате аккумулятор Крона на 9В (или блок питания 9-12 В).
В результате этого валы сервоприводов провернутся и встанут в положение 90*С. Это важно для корректного использования.
11. Остальные пять сервомоторов также по очереди подключите в А0. Не забывайте соблюдать полярность.
Готово! Отключите аккумулятор, сервоприводы и переходите к сборке робота.
Сборка электроники в корпус
1. В нижнюю часть туловища танцующего
робота установите два черных сервопривода и прикрутите их винтами к туловищу. Используйте винты из комплекта сервоприводов.
2. Вставьте насадки на вал в пазы ног робота и аккуратно прикрутите ноги к туловищу.
- Утолщения на ногах должны смотреть друг на друга.
- Закрепите винт достаточно плотно для того, чтобы деталь не проворачивалась самостоятельно, но и не слишком туго, чтобы не “пережать” механизм.
3. Установите черные сервоприводы в ноги робота. Проведите кабель так, чтобы сервоприводы не болтались в ноге, в зависимости от качества печати можно провести кабель по задней стенке ноги или через кабель-канал.
Закрепите сервоприводы винтами из набора сервопривода, .
4. Аккуратно установите ступни. Вставьте черные насадки на вал в пазы
5. В руки робота установите синий сервопривод. Зафиксируйте сервопривод винтом из комплекта.
6. Проденьте провод сервопривода
в отверстие в задней части робота.
7. Установите руки в корпус, как показано на рисунке. Вставьте белые насадки на вал в пазы.
8. Прикрутите руки и стопы к туловищу винтами из комплектов.
Для синих сервоприводов нужно использовать белые винты, для черных сервоприводов - черные.
Закрепите винт достаточно плотно для того, чтобы деталь не проворачивалась самостоятельно, но и не слишком туго, чтобы не “пережать” механизм.
9. Подключите провода к матрице и снимите защитную пленку.
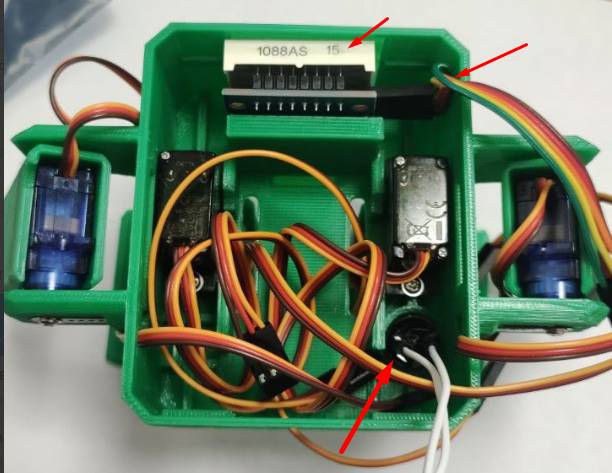


10. Установите матрицу в туловище так, чтобы была видна надпись на матрице, а контакты были расположены в сторону правой руки.
11. Установите пьезодинамик в специальный отсек.
12. В голову робота установите дальномер за фиксирующими наплывами.
Плата должна защелкнуться за стойки, для этого требуется приложить некоторое усилие. Если нужно, удалите часть пластика со стоек.
13. Установка светодиода во внутреннее отверстие головы робота.
- Посмотрите на расположение платы светодиода относительно платы дальномера.
- Во избежание КЗ наклейте на плату светодиода изоленту с той стороны, где она соприкасается с платой дальномера.
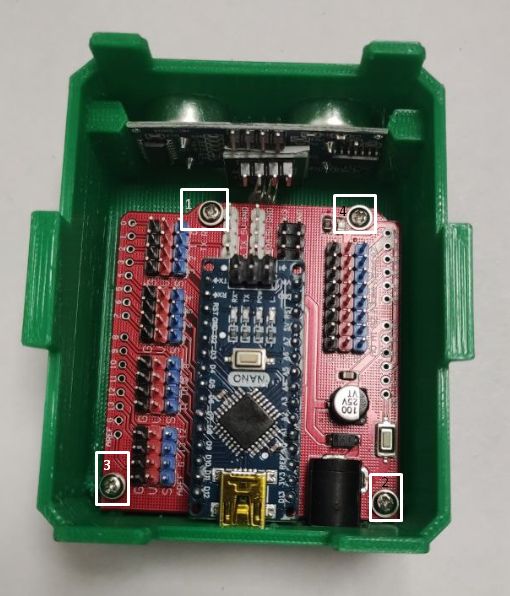
14. В голову робота установите плату Ardiono Shield и зафиксируйте четырьмя саморезами.
На этом сборка завершена, переходите к подключению Arduino.
Подключение электроники к Arduino
На плате расширения Arduino Sensor Shield расположено множество интерфейсов для подключения внешних устройств и питания.
В соответствии с Arduino NANO на плате Arduino Shield:
- дискретные порты D выделены синим цветом и пронумерованы TX1, RX0, D2 - D13.
- аналоговые порты A выделены зеленым цветом и пронумерованы A0 - A7.
1. Подключите сервоприводы к пинам платы Arduino согласно таблице.
Необходимо соблюдать полярность:
- коричневый провод сервопривода соответствует метке “G” на плате;
- красный провод сервопривода - “V”;
- желтый провод сервопривода - “S”.
|
Сервопривод |
Пин Arduino |
|
Левая рука |
D7 |
|
Правая рука |
D8 |
|
Левая нога |
A0 |
|
Правая нога |
A1 |
|
Левая ступня |
A2 |
|
Правая ступня |
A3 |
2. Подключите дальномер согласно таблице.
|
Пин детали |
Пин Arduino |
|
Echo |
D2 |
|
Trig |
D9 |
|
GND |
G (любой GND) |
|
VCC |
V (любой VCC) |
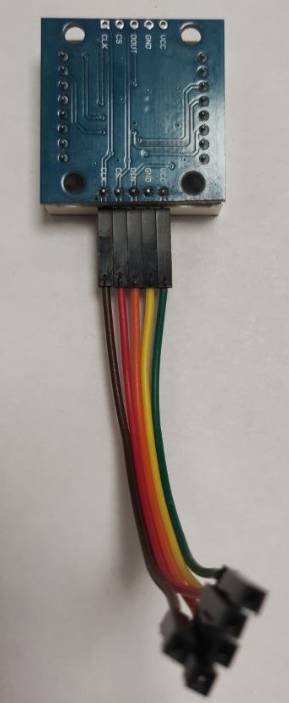
3. Подключите светодиодную матрицу согласно таблице.
|
Пин детали |
Пин Arduino |
|
GND |
G(любой GND) |
|
VCC |
V(любой VCC) |
|
CS |
D10 |
|
CLK |
D11 |
|
DIN |
D12 |
4. Подключите пьезодинамик согласно таблице.
|
Пин детали |
Пин Arduino |
|
Signal |
D13 |
|
GND |
G(любой GND) |
5. Подключите RGB светодиод согласно таблице.
|
Пин детали |
Пин |
|
R |
D3 |
|
G |
D5 |
|
B |
D6 |
|
GND |
G(любой GND) |
Робот с подключенными деталями будет выглядеть похожим образом.
6. Подключите аккумулятор (9-12В) с адаптером к роботу.
7. Подключите аккумулятор в разъем питания и соедините голову и корпус.
При подаче питания все сервоприводы повернутся на 90*С.
Танцующий робот готов. Подключение к RobboScratch и тестирование робота описано в Быстром старте с танцующим роботом.